首页
联系我们
-
- 电话: 024-83656512
- 通讯地址: 辽宁省沈阳市浑南区创新路195号欢迎莅临云顶集团官网浑南校区云顶线路快速检测中心H019信箱
多水下机器人协同控制研究取得重要进展并顺利完成海试
近日,由我司徐红丽教授负责的多水下机器人协同控制技术研究取得重要进展,配合鹏城国家实验室重点项目“多水下敏捷机器人协同作业平台”顺利完成第一阶段海上试验验证,在国内率先实现了由“1艘母船+2艘无人艇+4台自主水下机器人”组成的异构多水下机器人系统的协同编队。
徐红丽教授带领的水下机器人研究团队首先面向异构、跨域多水面、水下机器人平台提出了一种通用分布式多水下机器人协同控制体系结构,包括一套通用的混合链路通信接口协议、一种跨平台通用的协同控制器和面向水下弱通信的分层分布式协同控制体系框架。其次,为了克服实际环境中水声通信的延迟和不确定性,提出了基于元启发智能的异构多水下机器人编队控制技术。局部水声通信网络下,水下机器人从无人艇的广播信息中获取全局信息,并作为启发式信息融入队形控制算法中,实现无人水面艇和水下机器人的协同一致运动。
应用所提出的理论方法完成了15套通用协同控制器的开发,其中7套集成于鹏城实验室采购的无人艇和自主水下机器人平台上。自2020年9月以来,配合项目总体先后完成了雅宝水库联合调试、松山湖湖上试验、大亚湾海上试验等一系列测试和验证,初步验证了通用协同控制器的可行性。从试验数据看在各厂家自主水下机器人平台航行性能不一致的条件下,协同控制器可保持队形控制误差稳定在5%以内。
未来,水下机器人研究团队将继续深入研究水下弱通信、弱观测环境对协同控制一致性的影响机理,进一步优化通用协同控制解决方案,并与鹏城国家实验室等国内一流团队紧密合作,推动我国多水下机器人系统研究与应用的进步。
所研制的通用协同控制器(集成于每个协同平台上)
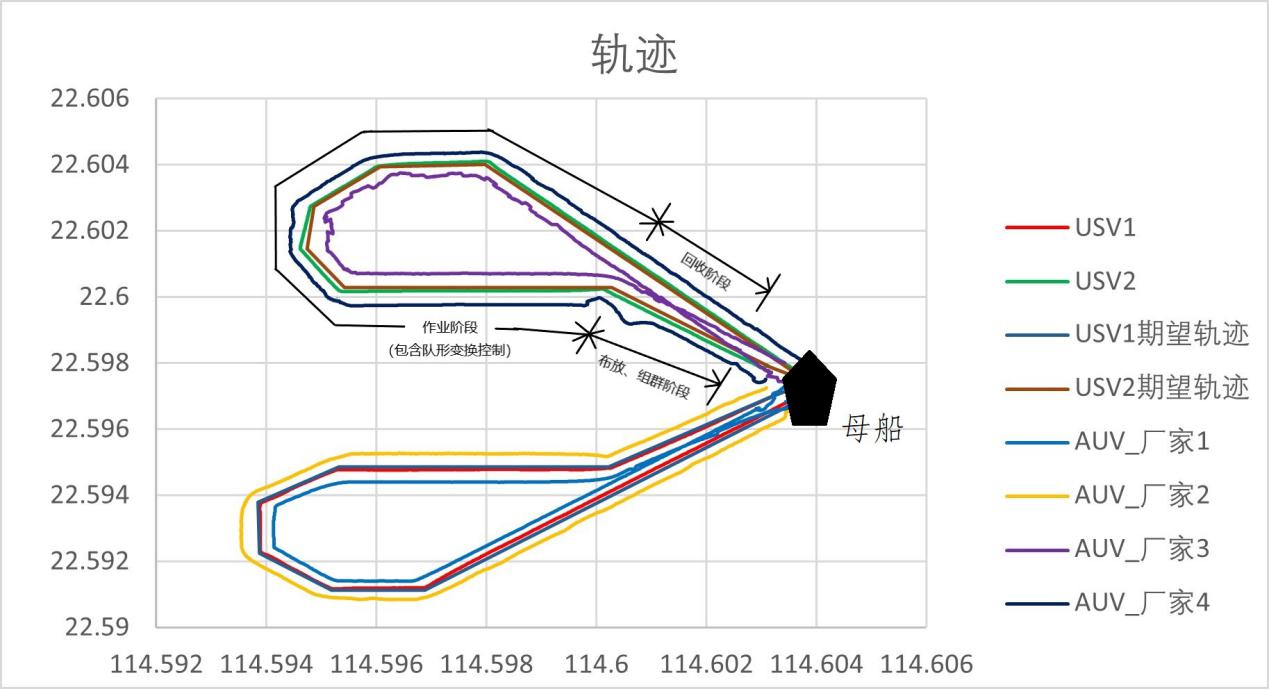
“1+2+4”协同编队试验结果——航行轨迹
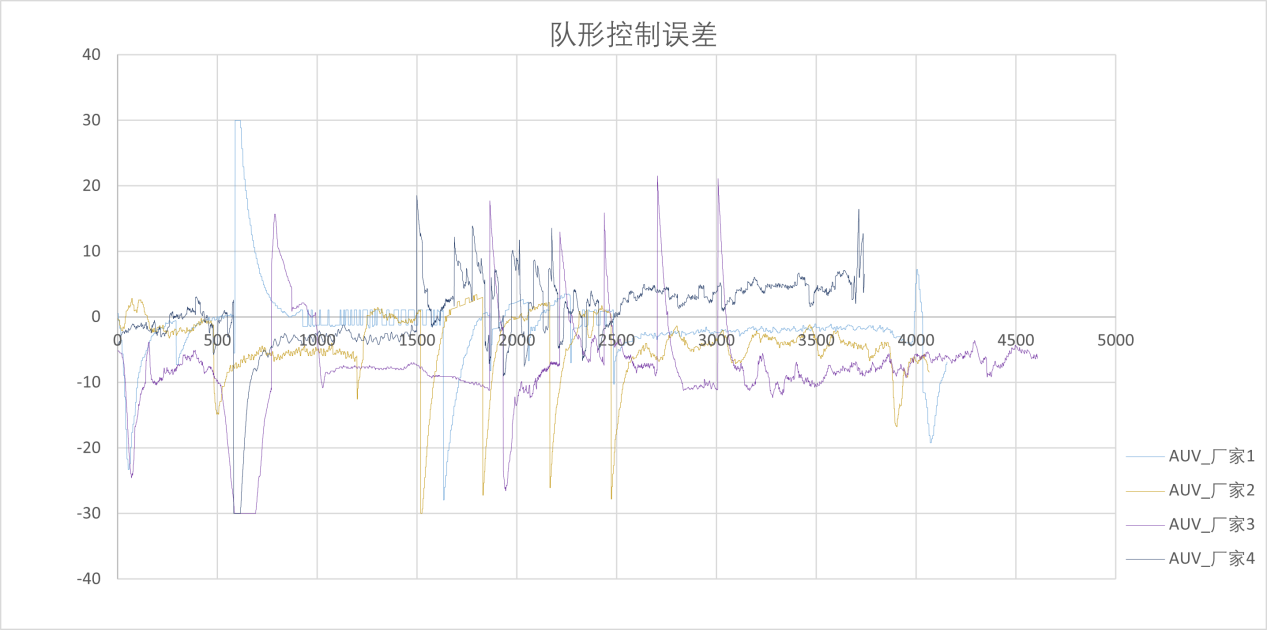
“1+2+4”协同编队试验结果——队形控制误差

全体项目组人员合影
